
On January the first I announced that this year would be the year of the pathfinder. Since then, I got mentally stuck a bit. Since I had already made an attempt at solving the problem, I found myself slip into the gulleys created by my past efforts. It was very tempting to just continue where I stopped last time, even though I know that my previous approach has important downsides. It makes no sense to solve the wrong problem, so although I was very eager to get started I realized that it was important to identify the right problem first. After going in circles for quite a while, I decided to get help and figure out how to approach this. I stumbled again on Paul MacCready’s approach during the development of the Gossamer Condor. After analysing the competition, he concluded: “The problem is that we don’t understand the problem.”
My previous approach
In 2020 I made a similar attempt. This showed promise, but it lacked important problems.
The most important thing was that it only gives you the most optimal route, with the assumption that all the thermals will still be there when you go to where they were last observed. This is obviously not true, even more so in the evening when thermal activity dies down. A friend suggested that I incorporate the chance that a thermal is not present. This makes a lot of sense, but the algorithm I chose gave me no easy way of incorporating this.
Then I collected statistics without any distinction between lift found during gliding and lift found during circling. This means that if someone circles in lift for a long time, the statistics for that location will be heavily biased towards that lift.
The algorithm also struggled with missing data. Due to the gaps that naturally exist in the coverage of the Open Glider Network, there will be areas where I collect no statistics at all. I had to make assumptions for those locations.
Finding problems
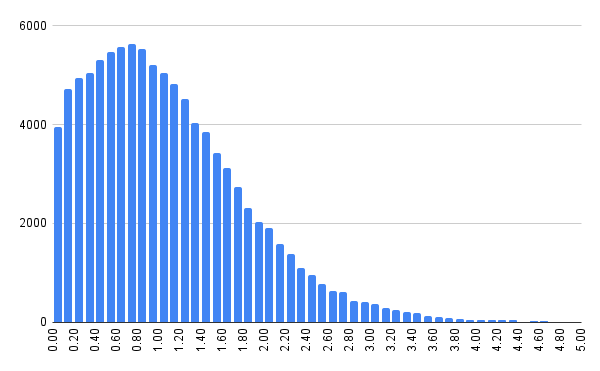
The first thing I’m going to do is analyse a lot of gliding days. What is possible with perfect knowledge? How fast could we really fly? How much lift do we really need to stay airborne? How often do predicted thermals still exist when we reach them?
Process
The process I’m using this year is a bit different from last year. Where last year I started to build something straight away, I’m trying to verify my direction a little bit. The reason for this is quite simple: during the presentation of Hobbes in Darmstadt I learnt that tactile feedback would have been much better. I disregarded that quite early (due to safety and complexity concerns), but I do think I could have done a bit more research. Since I know from conversations with a friend who’s an avid cross country pilot that “just the fastest route” might not be sufficient, I am trying to refine the question a bit first.
This is all new and difficult for me. Although I have attended university, I have never had prolonged guidance on “how to do research”. Therefore I’ve always been more of an engineer/tinkerer than a scientist.
